







Estación Total Robótica RS10
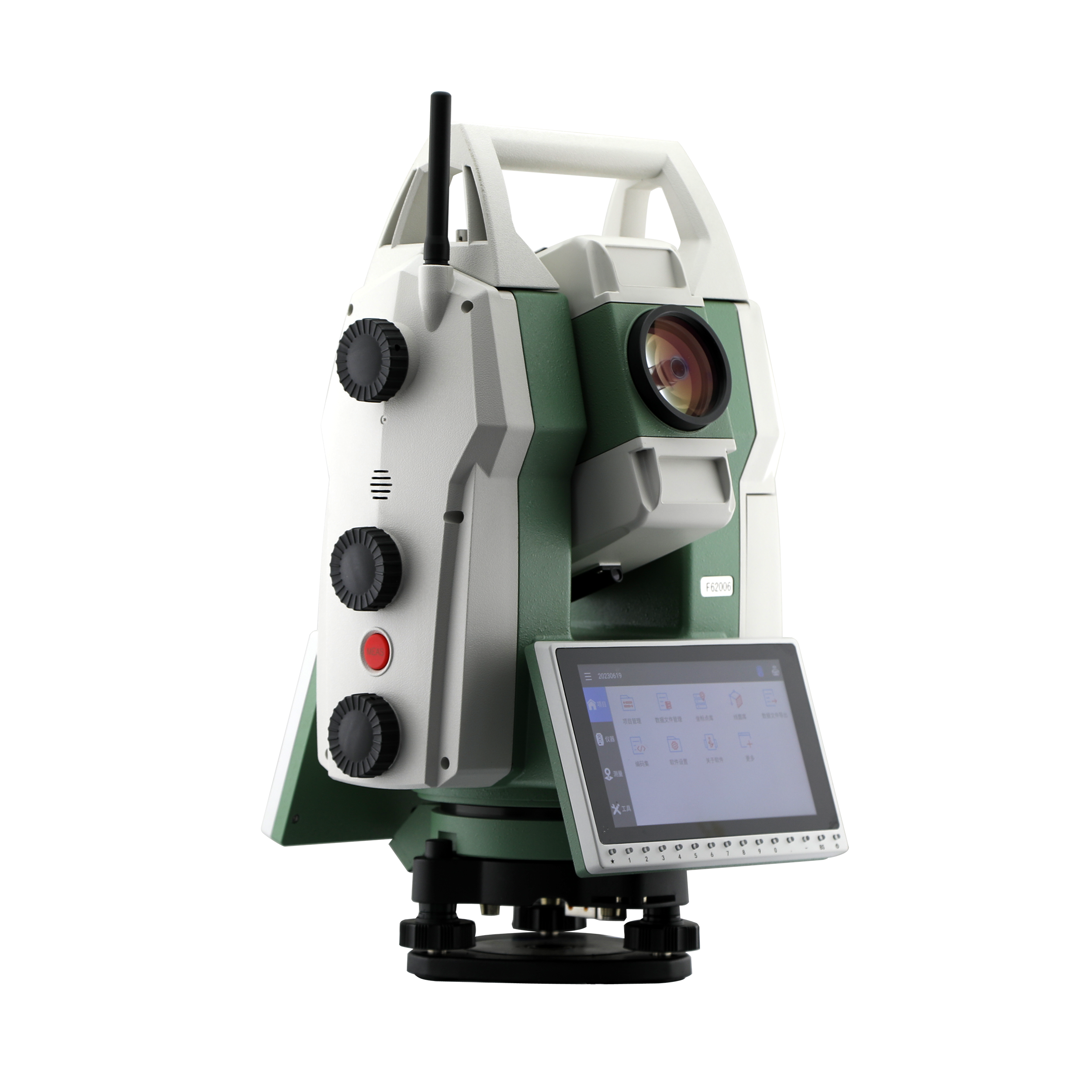


La estación total robótica RS10 tiene una función de puntería automática, con un algoritmo inteligente completamente nuevo para corregir con precisión y automáticamente las desviaciones en la lectura de ángulos al apuntar.
Esta tecnología permite a la estación total robótica completar rápidamente la búsqueda del objetivo y determinar con precisión la posición central del prisma, asegurando una mayor eficiencia de trabajo en diversos entornos laborales.
El sistema de estación total robótica RS10 lanzado por FOlF es un sistema de medición que integra reconocimiento automático de objetivos, puntería automática, medición de ángulos y distancia automáticos, seguimiento automático de objetivos y registro automático.
Lleve la encuesta a la era de la automatización y proporcione a los topógrafos soluciones de medición automatizadas más eficientes y convenientes. El instrumento ofrece una opción más rentable para el monitoreo de deformaciones, medición de secciones transversales, etc. Realiza la automatización desde la recopilación de datos en el campo hasta el cálculo y la salida de resultados, y mejora significativamente la eficiencia del trabajo en interiores y exteriores, reduce en gran medida la intensidad laboral de las personas, elimina varios errores y también puede reducir los requisitos de los métodos de medición tradicionales para las personas y el equipo. Siempre que domine las operaciones básicas, puede proceder con el trabajo en interiores y exteriores.
Enfoque accionado por motor
- El enfoque es estable y conveniente
En compensación integrada
- El compensador integrado de alta precisión está colocado en el eje, y la compensación es más rápida y más estable
Comunicación diversificada inte rfaces
- Bluetooth, comunicación RS232, redes 4G, que satisfacen las necesidades de los clientes para el control remoto de comandos
Tecnología de accionamiento directo
- Con una nueva generación de motor de accionamiento directo, la velocidad máxima puede alcanzar 180°/s, y puede realizar un ajuste fino de ángulo de alta resolución y un posicionamiento de alta precisión
Abundantes menús de automatización funciones de medición
- Autoapuntado
- Autoseguimiento
- Reconocimiento inteligente
- Control de telemetría
Alto nivel de protección, rug gizado y fácil de operar
- Tiene un alto nivel de rendimiento a prueba de agua y polvo
El estilo Android de g La interfaz de operación gráfica lo hace fácil para ti a obtener comenzado
- Sistema operativo Android integrado
- Operación de pantalla táctil grande e interfaz gráfica
Pr Guías de medición profesional para ayudarte a terminar una amplia gama de aplicaciones con facilidad
Funciones perfectas de medición y replanteo, medición de compensación, resección, medición de carretera, medición transversal, medición del lado opuesto, múltiples observaciones, etc.
- Funciones prácticas de aplicación en ingeniería como medición y diseño de carreteras, medición de sección transversal, etc.
- El escaneo automático accionado por motor, monitoreo automático, etc.
- Abundantes funciones técnicas COGO, cálculo inverso de coordenadas y cálculo de poligonal, cálculos de intersección, cálculo de ángulos, cálculo de compensación, cálculo de curvas, cálculo de áreas, etc.
- Función de importación y exportación de datos en una variedad de formatos comúnmente utilizados
|
Modelo |
RS10 |
|
Telescopio |
|
|
Aumento/Resolución |
30×/3' |
|
Campo de visión |
1°30′ |
|
Distancia mínima de enfoque |
1.5m |
|
Apertura efectiva |
φ50 |
|
Imagen |
Erecto |
|
Ángulo Medir |
|
|
Precisión |
0.5' 1' |
|
Método |
Codificador absoluto |
|
Unidad |
360°(dms/d)/400gon/6400mil |
|
Mín. visualización |
0.1' |
|
Distancia Medir |
|
|
Precisión Prisma |
±(1+1×10⁶D)mm |
|
Hoja reflectante |
±(2+2×10⁶D)mm |
|
Sin reflector |
±(3+2×10⁶D)mm |
|
Rango Prisma estándar(modo prisma remoto) |
2~5000m |
|
Hoja reflectante |
1~800m |
|
Mini prisma |
2~1200m |
|
Sin reflector |
1~1000m |
|
Tiempo Fino/Rápido/Seguimiento |
≤1.0s(inicial 1.5s)/≤0.5s(inicial 1.0s)/≤0.2s(inicial 1.0s) |
|
Unidad |
m/ft/USft |
|
Mín. visualización |
0.0001m/0.001m(Fino、Rápido),0.01m(Seguimiento) |
|
ATR |
|
|
Rango de trabajo |
5m~1000m |
|
Precisión básica de posicionamiento |
±1.5mm@≤200m,±1.5'@>200m |
|
Tiempo de posicionamiento (en campo de visión del telescopio) |
0.5s~2s |
|
Motor impulsar |
|
|
Rotación máxima angular velocidad |
180°/s |
|
Valor mínimo para control de micro-rotación a baja velocidad |
1' |
|
T inclinación compensación |
|
|
Método de compensación |
Tipo de doble eje integrado |
|
Rango de compensación |
≥±6.0′ |
|
Nivel vial sensibilidad |
|
|
Vial de nivel de placa |
30'/2mm |
|
Vial de nivel circular |
8'/2mm |
|
Láser plomada |
|
|
Precisión |
±1.0mm/0.8m~1.5m |
|
Punto láser |
≤2.0mm/0.8m~1.5m |
|
Potencia |
|
|
Batería |
11.1V,5800mAh batería de litio |
|
Tiempo de trabajo |
5h-8h |
|
Otro |
|
|
Unidad sin fin |
1 para horizontal, 1 para vertical |
|
Pantalla |
Pantalla táctil de 6 pulgadas, resolución 1280*720, pantallas dobles, soporte para pantalla única |
|
Teclado |
15 teclas en la parte inferior, iluminación de fondo + sensibilidad automática a la luz |
|
Puerto de comunicación |
USB a RS232, puerto USBC, puerto USB HOST, estándar BT de corto alcance, BT de largo alcance (opcional), varias redes (4G opcional) |
|
Soporte de función |
Tecla de disparo/salida de zumbador/altavoz/tarjeta TF/sensor de temperatura y presión atmosférica /actualización en la nube |
|
Sistema |
ANDROID11.0, CPU ARM A55 de cuatro núcleos de 64 bits a 2GHz, 8GB+128GB |
|
Grado de protección |
IP55(IEC60529) |
|
Rango de temp. de trabajo |
-20℃~+50℃ |
Productos Relacionados













Contáctenos
Información del Producto
Cantidad
Unidad
Pieza
Soporte para pedidos de muestras, personalización, venta al por mayor directa y pago completo. Si el producto que busca no tiene contenido personalizado correspondiente, por favor complete el formulario a continuación para contactarnos, y le responderemos lo antes posible.